|
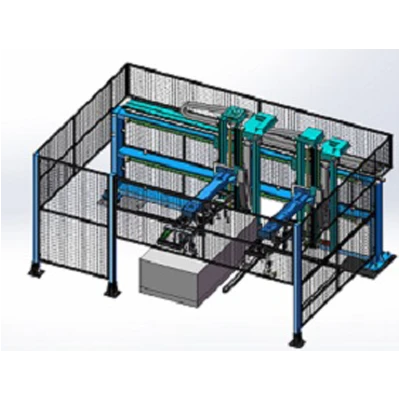
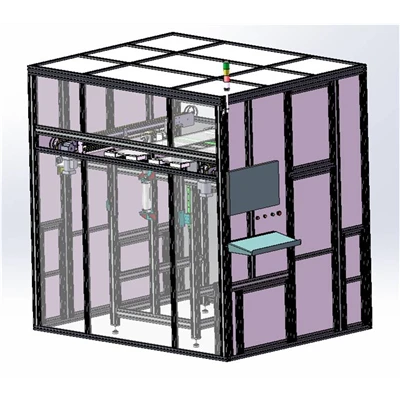
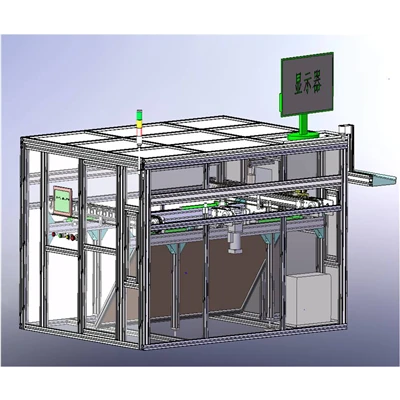
Funkcija ir įvadas
Stiklo paėmimas ir prijungimas prie perdavimo linijos.
1.Stiklo pakrovimo sistema susideda iš stiklą judančios roboto rankos ir popieriaus rinkimo roboto rankos.
2. Įrenginyje yra dvi stiklo laikymo stotys ir popieriaus laikymo stotis.
3.Stiklą judanti roboto ranka prideda stiklą į perdavimo liniją, o popierių renkanti roboto ranka pašalina popierių.
4. Mašina varoma servo varikliu, siurblys pritraukia stiklą į paskirtą stotį.
5. Stiklo pakrovimo roboto svirtis turi konsolinę struktūrą, o popieriaus paėmimo roboto ranka yra portalinė.
Pagrindinis parametras
Modulio formatas: (1580-2000)mm*(800-1000)mm
Pasivažinėjimo dviračiu laikas :<35s
Max capacity: >2468 per dieną
Operatorius prisijungęs: nėra
Nominali galia: 8,26kw
Slėgis: 0.7MPa+0.1
Įėjimo įtampa: 380V
Matmenys: 4610mmx2780mmx2150mm
Privalumas
1.Mašina naudoja plieninę konstrukciją su suvirinimo rėmo korpusu, dideliu stiprumu, patikimumu ir tvirtumu pakrovimo metu.
2. Stiklo laikiklio siurbimo plokštė pagaminta iš poliuretano, kuris pakraunant neatspausdins ant stiklo.
3.Servo variklis veikia tiksliai ir stabiliai.
4.Mašina turi apsauginę tvorelę, kad būtų užtikrintas veikimo saugumas.
5. Sumažinkite operatoriaus pakrovimo neapibrėžtumą, padidinkite našumą.
6. Įrenginys yra visiškai automatinis ir nereikalauja žmogaus įsikišimo.
|